 Meni
MeniFORMULE ZA ANALITIČKU GEOMETRIJU U PROSTORU
$d=\sqrt{(x_2-x_1)^2+(y_2-y_1)^2+(z_2-z_1)^2}$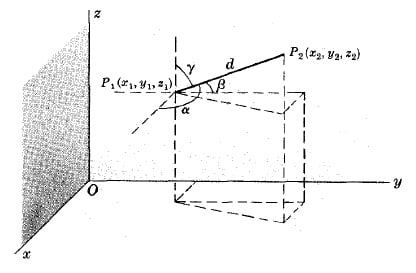
KOSINUSI PRAVCA PRAVE KOJA PROLAZI KROZ TAČKE $P_1(x_1,y_1,z_1)$ I $P_2(x_2,y_2,z_2)$
$l=\cos\alpha=\frac{x_2-x_1}{d}$, $m=\cos\beta=\frac{y_2-y_1}{d}$, $n=\cos\gamma=\frac{z_2-z_1}{d}$
gde su $\alpha,\beta,\gamma$ uglovi koje prava $P_1P_2$ zaklapa pozitivnim stranama $x,y,z$ osa respektivno a $d$ je dato formulom iznad.
VEZE IZMEĐU KOSINUSA PRAVACA
$\cos^2\alpha+\cos^2\beta+\cos^2\gamma=1$ ili $l^2+m^2+n^2=1$
KOEFICIJENTI PRAVCA
Brojevi $L,M,N$ koji su proporcionalni kosinusima pravaca $l,m,n$ se zovu koeficijenti pravca. Veza između njih je data sa
$l=\frac{L}{\sqrt{L^2+M^2+N^2}}$, $m=\frac{M}{\sqrt{L^2+M^2+N^2}}$, $n=\frac{N}{\sqrt{L^2+M^2+N^2}}$
JEDNAČINA PRAVE KOJA PROLAZI KROZ TAČKE $P_1(x_1,y_1,z_1)$ I $P_2(x_2,y_2,z_2)$ U STANDARDNOM OBLIKU
$\frac{x-x_1}{x_2-x_1}=\frac{y-y_1}{y_2-y_1}=\frac{z-z_1}{z_2-z_1}$ ili $\frac{x-x_1}{l}=\frac{y-y_1}{m}=\frac{z-z_1}{n}$
Ovo je takođe tačno ako se $l,m,n$ zamene sa $L,M,N$ respektivno.
JEDNAČINA PRAVE KOJA PROLAZI KROZ TAČKE $P_1(x_1,y_1,z_1)$ I $P_2(x_2,y_2,z_2)$ u PARAMETARSKOM OBLIKU
$x=x_1+lt, y=y_1+mt, z=z_1+nt$
Što je takođe tačno i ako se $l,m,n$ zamene sa $L,M,N$ respektivno.
UGAO $\phi$ IZMEĐU DVE PRAVE SA KOSINUSIMA PRAVACA $l_1, m_1, n_1$ I $l_2, m_2, n_2$
$\cos\phi=l_1l_2+m_1m_2+n_1n_2$
OPŠTA JEDNAČINA RAVNI
$Ax+By+Cz+D=0$ [$A,B,C,D$ su konstante]
JEDNAČINA RAVNI KOJA SADRŽI TAČKE $(x_1,y_1,z_1),(x_2,y_2,z_2),(x_3,y_3,z_3)$
$\begin{vmatrix}x-x_1 & y-y_1 & z-z_1\\ x_2-x_1 & y_2-y_1 & z_2-z_1\\ x_3-x_1 & y_3-y_1 & z_3-z_1\end{vmatrix}=0$
ili
$\begin{vmatrix} y_2-y_1 & z_2-z_1\\ y_3-y_1 & z_3-z_1\end{vmatrix}(x-x_1)$
$+\begin{vmatrix} z_2-z_1 & x_2-x_1\\ z_3-z_1 & x_3-x_1\end{vmatrix}(y-y_1)$
$+\begin{vmatrix} x_2-x_1 & y_2-y_1\\ x_3-x_1 & y_3-y_1\end{vmatrix}(z-z_1)=0$
JEDNAČINA RAVNI U SEGMENTNOM OBLIKU
$\frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1$
gde su $a,b,c$ preseci sa $x,y,z$ osama respektivno.

JEDNAČINA RAVNI KROZ TAČKU $(x_0,y_0,z_0)$ I NORMALNU NA RAVAN $Ax+By+Cz+D=0$
$\frac{x-x_0}{A}=\frac{y-y_0}{B}=\frac{z-z_0}{C}$ ili $x=x_0+At, y=y_0+Bt, z=z_0+Ct$
Treba primetiti da koeficijenti pravca za pravu normalnu na ravan $Ax+By+Cz+D=0$ su $A,B,C$
UDALJENOST TAČKE $(x_0,y_0,z_0)$ OD RAVNI $Ax+By+Cz+D=0$.
$\frac{Ax_0+By_0+Cz_0+D}{\pm\sqrt{A^2+B^2+C^2}}$
gde znak biramo tako da udaljenost ne bude negativna.
NORMALAN OBLIK JEDNAČINE RAVNI
$x\cos\alpha+y\cos\beta+z\cos\gamma=p$
gde je $p=$ normalno rastojanje od $O$ do ravni u $P$, a $\alpha, \beta, \gamma$ su uglovi između $OP$ i pozitivnih strana $x,y,z$ osa.

TRANSFORMACIJA KOORDINATA ČISTOM TRANSLACIJOM
$\left\{\begin{array}{lr}x=x'+x_0\\ y=y'+y_0\\ z=z'+z_0\end{array}\right.$ or $\left\{\begin{array}{lr}x'=x-x_0\\ y'=y-y_0\\ z'=z-z_0\end{array}\right.$
gde su $(x, y, z)$ stare koordinate [t.j. koordinate u $xyz$ sistemu],$(x', y', z')$ su nove koordinate [u $x'y'z'$ sistemu] i $(x_0,y_0,z_0)$ su koordinate novog koordinatnog početka $O'$ u starom $xyz$ koordinatnom sistemu.

TRANSFORMACIJA KOORDINATA ČISTOM ROTACIJOM
$\left\{\begin{array}{lr}x=l_1x'+l_2y'+l_3z'\\ y=m_1x'+m_2y'+m_3z'\\ z=n_1x'+n_2y'+n_3z'\end{array}\right.$
or
$\left\{\begin{array}{lr}x'=l_1x+m_1y+n_1z\\ y'=l_2x+m_2y+n_2z\\ z'=l_3x+m_3y+n_3z\end{array}\right.$
gde su koordinatni počeci $xyz$ i $x'y'z'$ sistema isti i $l_1,m_1,n_1; l_2,m_2,n_2; l_3,m_3,n_3$ kosinusi pravca $x', y', z'$ osa u odnosu na $x, y, z$ ose respektivno.

TRANSFORMACIJA KOORDINATA TRANSLACIJOM I ROTACIJOM
$\left\{\begin{array}{lr}x=l_1x'+l_2y'+l_3z'+x_0\\ y=m_1x'+m_2y'+m_3z'+y_0\\ z=n_1x'+n_2y'+n_3z'+z_0\end{array}\right.$
ili
$\left\{\begin{array}{lr}x'=l_1(x-x_0)+m_1(y-y_0)+n_1(z-z_0)\\ y'=l_2(x-x_0)+m_2(y-y_0)+n_2(z-z_0)\\ z'=l_3(x-x_0)+m_3(y-y_0)+n_3(z-z_0)\end{array}\right.$
gde $O'$ iz $x'y'z'$ sistema ima koordinate $(x_0,y_0,z_0)$ u $xyz$ sistemu, a $l_1,m_1,n_1; l_2,m_2,n_2; l_3,m_3,n_3$ su kosinusi pravaca $x', y', z'$ osa u odnosu na $x, y, z$ ose respektivno.

CILINDRIČNE KOORDINATE $(r, \theta, z)$
Tačka $P$ može biti određena cilindričnim koordinatama $(r, \theta, z)$ kao i pravougaonim koordinatama $(x, y, z)$.
Transformacija između ovih koordinata je
$\left\{\begin{array}{lr}x=r\cos\theta\\ y=r\sin\theta\\ z=z\end{array}\right.$ ili $\left\{\begin{array}{lr}r=\sqrt{x^2+y^2}\\ \theta=\text{tg}^{-1}\frac{y}{x}\\ z=z\end{array}\right.$

SFERNE KOORDINATE $(r, \theta, \phi)$
Tačka $P$ može biti određena sfernim koordinatama $(r, \theta, \phi)$ kao i pravougaonim $(x, y, z)$.
Transformacija između tih koordinata je
$\left\{\begin{array}{lr}x=r\sin\theta\cos\phi\\ y=r\sin\theta\sin\phi\\ z=r\cos\theta\end{array}\right.$
ili
$\left\{\begin{array}{lr}r=\sqrt{x^2+y^2+z^2}\\ \phi=\text{tg}^{-1}\frac{y}{x}\\ \theta=\cos^{-1}\left(\frac{z}{\sqrt{x^2+y^2+z^2}}\right)\end{array}\right.$

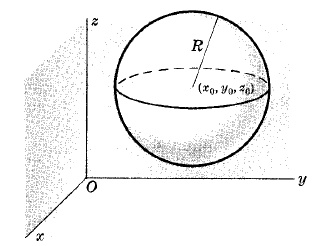
JEDNAČINA SERE U PRAVOUGAONIM KOORDINATAMA
$(x-x_0)^2+(y-y_0)^2+(z-z_0)^2=R^2$
gde je centar sfere $(x_0,y_0,z_0)$, a poluprečnik $R$.
JEDNAČINA SFERE U CILINDRIČNIM KOORDINATAMA
$r^2-2r_0r(\theta-\theta_0)+r_0^2+(z-z_0)^2=R^2$
gde je centar sfere $(r_0,\theta_0,z_0)$ u cilindričnim koordinatama, a poluprečnik $R$.
Ako je centar u koordinatnom početku, jednačina je:
$r^2+z^2=R^2$
JEDNAČINA SFERE U SFERNIM KOORDINATAMA
$r^2+r_0^2-2r_0 r\sin\theta\sin\theta_0\cos(\phi-\phi_0)=R^2$
gde je centar sfere $(r_0,\theta_0,\phi_0)$ u sfernim koordinatama a poluprečnik joj je $R$.
Ako je centar sfere u koordinatnom početku jednačina je
$r = R$.
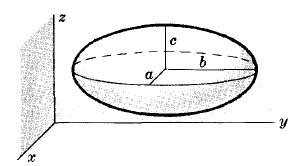
JEDNAČINA ELIPSOIDA SA CENTROM U $(x_0,y_0,z_0)$ I POLUOSAMA $a, b, c$
$\frac{(x-x_0)^2}{a^2}+\frac{(y-y_0)^2}{b^2}+\frac{(z-z_0)^2}{c^2}=1$
ELIPTIČKI CILINDAR SA z OSOM KAO OSOM CILINDRA
$\frac{x^2}{a^2}+\frac{y^2}{b^2}=1$
gde su $a, b$ poluose elipse koja je poprečni presek.
Ako je $b = a$ dobija se kružni cilindar (valjak) poluprečnika $a$.

ELIPTIČKI KONUS SA z OSOM KAO OSOM KONUSA
$\frac{x^2}{a^2}+\frac{y^2}{b^2}=\frac{z^2}{c^2}$

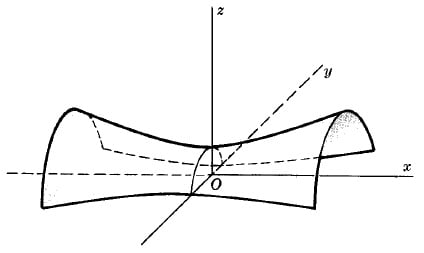
JEDNOGRANI HIPERBOLOID
$\frac{x^2}{a^2}+\frac{y^2}{b^2}-\frac{z^2}{c^2}=1$.

Hiperboloid - animirani(crvena linija je ravna)
DVOGRANI HIPERBOLOID
$\frac{x^2}{a^2}-\frac{y^2}{b^2}-\frac{z^2}{c^2}=1$.
ELIPTIČKI PARABOLOID
$\frac{x^2}{a^2}+\frac{y^2}{b^2}=\frac{z}{c}$

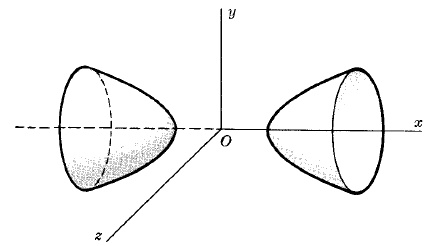
HIPERBOLIČKI PARABOLOID
$\frac{x^2}{a^2}-\frac{y^2}{b^2}=\frac{z}{c}$
Obratiti pažnju na orijentaciju osa na slici.

{kind=link}